相关问题链接:神经系统是如何实现肢体动作的? - 知乎 https://www. zhihu.com/question/3053 39445
近来一直想梳理并分享一年多所学,但没有找到好的切入点。感谢这个题目,将我想要分享的东西串起来了。这篇文章是这个问题回答的一部分。
题图是笔者拍的小鼠步态。
有一句心灵鸡汤说:你必须十分努力,才能显得毫不费力 。神经系统十分完美地诠释了这一点。35亿年的演化之后,在目前的终极演化物种——人类身上,神经系统利用上万上亿的神经细胞,精准调控人体的600多块肌肉,把走路、触碰、抓握这些操作变成了可以后台运行、极少占用CPU的小事。在人类完全实现基于脑电波的人机交互之前,肢体动作是将个人意志付诸实践的必要过程,是主观能动性的直接体现。关于智能机器的研发都无可避免地涉及到机械臂或机械腿的设计。至今没有智能机器能够完美实现看似简单且机械的双足行走(bipedal locomotion)。
我在第一次构思这个回答时,曾经想到一个问题:在行进(locomotion)方式上,我们为什么选择了双足行走?请想象一下,假如你是一名初级造物者,要创造出你的第一个具有行进能力的物种,你觉得什么样的行进方式最容易实现呢?这是个非常有趣的问题,一度吸引我在演化生物学中探本溯源(最后引起了我对神经发育的兴趣)。古老的生物,如海绵海星,是没有左右对称结构的。它们是辐射对称的,定向能力差,依靠水流漂泊,是真切的命运的浮萍。演化史的长夜漫漫里,生命之灵疯狂试探,终于捏出了足;在演化出脊椎动物的过程中还很可能发生了身体的背-腹轴翻转(相关简介参见:从无脊椎动物到脊椎动物为什么心脏的位置由背面移到了腹面? ),导致出现神经系统对肢体进行对侧调控的现象。
我将用五篇文章从运动的组织和计划、"动作执行器"、"基本运动包"、行走与站立、精细调控的几个部分,尝试回答原问题。第一部分基于Kandel等人编著的《神经科学原理》及个人理解写就。如果发现笔者对相关内容存在理解偏差,欢迎指正。
走路这件小事(一):运动的组织与计划 运动系统的大部分工作是在无意识参与的情况下完成的。也就是说,与高级认知相比,这是相当机械的一件事。我们不妨暂且把自己的躯体当做一台机器,然后思考什么样的程序才是操控这台机器的最优解。这样也许更方便理解。
要发起一个动作,就要先对其进行组织和计划。起码你要知道自己的起点和终点在哪,接着还要计算出一条可行路径来。这就是组织和计划。比如说给你一条"触碰A点"的指令,但你却不知道自己在哪,也不知道A点在哪,自然就会在原地茫然,没办法行动。
非常毒鸡汤地说,许多人——也包括我——就是这么个情况。"成为一名成功人士/有钱人""过上幸福生活"就属于指令不清。什么才是成功/有钱啊,什么才是幸福啊,这个A点究竟在哪,我又离这个不知道在哪的目标有多远?定义不清就很容易迷茫。有人说A点就是山的顶端,但也有人小声说山脚的溪边才是A点。不过,心理学的许多研究暗示我们,也许A点的实际位置真的不重要,重要的是它在你内心里的表征。为了不迷茫,不如直接点,比如把第一个成功定义为某个职位,第一次幸福定义为毕业/找到工作/解决温饱/遇到男朋友女朋友,或许人生会简单点。
当我们对躯体发出"触碰A点"这条简单的指令时,运动系统要经过什么过程才能发出运动指令(motor commands)呢?
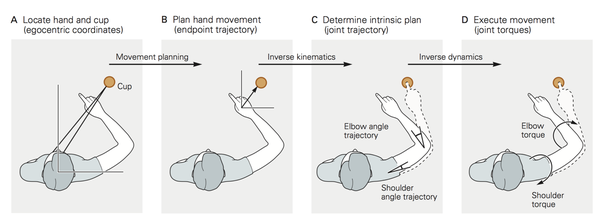
首先当然是要弄清楚已知条件和问题。第一步,运动系统必须知道A点的位置。这涉及到一系列的感觉运动转化(sensorimotor transformation)。具体地说,通过感觉加工,我们的脑对"A点"这一外部信息进行了内部表征;通常以头或手为基点建立笛卡尔空间坐标系来定位目标点(很有"我就是世界中心"的意味,粗暴简单),并计划手指的终点路径和轨迹。究竟这条路径是如何在头脑中画出来的,我并不了解。非要个答案的话,猜测一下,可能通过目标在视网膜上的投影与相关的认知表征实现。
接下来就是要把相关的运动参数输入给躯体了。我们需要什么样的参数呢?
在我的理解中,肢体的实质是由肌肉控制着的关节连接的骨头。也就是说,通过关节连接,每一段直臂得以做出幅度更大、更灵活的动作;而关节的转动是由肌肉控制的。因此,要想让骨头做出改变,就要知道各关节该如何转动。关节的运动轨迹是通过运动学逆运算得到的。这个运算结果并不是唯一的,毕竟两点之间有太多的可能轨迹(但总体来说,脑是偏爱直路的)。最后,基于关节的运动轨迹进行动力学逆运算得到每个关节力矩变化的参数。这样,我们就得到了一个简单运动所需的参数。
感觉运动转化过程(The Principles of Neural Science, 5e, Chapter 33) 好了,现在有了参数,那么只需要部署传递下去到各级执行者就可以了吗?没有那么简单。在制定计划时,通常需要对未来的可能结果进行预测,不然计划者就无法知道这个计划是否符合他的意志。此外,为了将实际与预测进行对比,还需要设计一个反馈系统。更朴实地比喻,就好比解应用题时需要进行条件演算和结果验证。
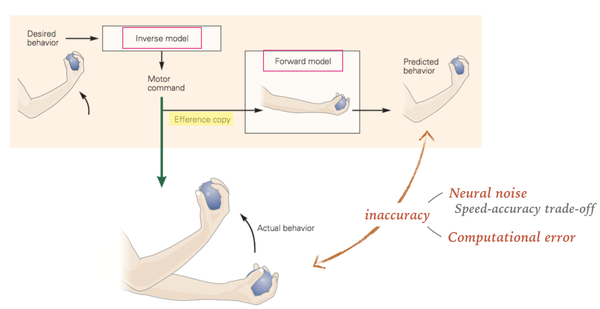
运动的内部模型包含两个部分:正演模型(forward model)和反演模型(inverse model)。反演模型用于计算运动输出,即下行运动命令。命令被执行后,肢体的空间位置发生改变,而新的位置信息会变成新的感觉输入。这种感觉输入就是一种本体觉(proprioception)。在系统向运动神经元及肌肉组织传递命令的同时,这份命令文件会作为输出拷贝(efference copy)输入到正演模型中用来估算未来的感觉输入,从而预测行为结果。
感觉运动转化涉及的内部模型(The Principles of Neural Science, 5e, Chapter 33) 预测与实际总是存在偏差的。这种偏差主要有两部分,其一是神经噪音。在计算时,运算速度与准确性总是存在此消彼长的权衡。这很容易理解。我们估算时常进行四舍五入,而速度影响取舍精度,取舍精度决定准确性。另一部分偏差来自于计算误差。这种计算误差在平日里表现不突出。但是有一种简单的实验不仅可以淋漓尽致体现计算误差,还能体现我们的学习与适应。
这个实验任务很简单:墙上悬挂靶图,人立于一臂之外,持笔迅速指向靶心。大多数人在十次尝试内就可以准确无误地瞄准靶心。但是如果要求受试者戴上一副特制的、能使视网膜上的物像偏右10度的眼镜,那么在最初的尝试中,他们快速伸出手指向靶心,结果却发现自己离靶心差得十万八千里(猜一下是偏左了还是偏右呢)。我个人的战绩是,25次左右尝试后修正了神经系统按原有视觉模式计算出现的偏差,能够在新环境下重新瞄准。
另外,运动命令还有一个很吸引我的funny fact:在运动中,速度总是对称单峰式平滑变化的。也就是说,肢体的起始运动速度是零,加速到达顶点后减速,最后在速度为零时抵达空间终点。这种出色的自动的启动制动表现令人着迷。
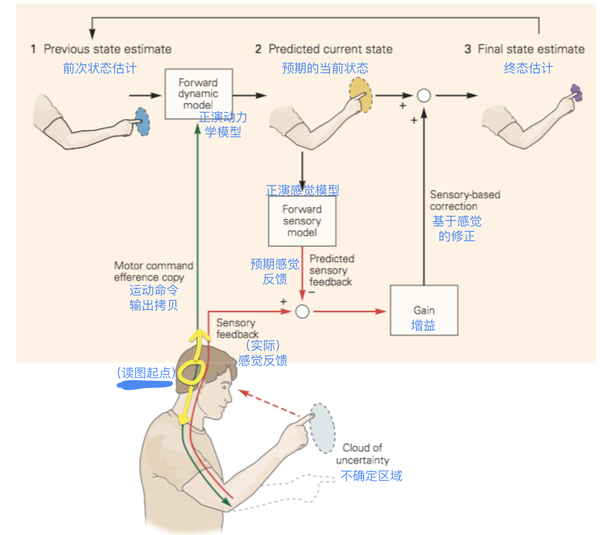
这一节的最后谈谈运动的信息反馈。如上所言,为了比较预测情况和实际情况,需要反馈信息的帮助。脑向下发出运动命令后,本体感觉神经元从肌肉的本体觉感受器收集当下的肢体信息(之后会另开篇幅讲述细节),将其上行传递并与正演模型运算的预期感觉信息进行比较。如果两者不吻合,就基于感觉反馈进行计划修正。这个动态的循环过程可以最终使手可以较为准确地完成"触碰A点"的指令。
前馈预测与感觉反馈(The Principles of Neural Science, 5e, Chapter 33)
(这一节先画一个大的plan图,接下来再仔细说每一个模块在躯体和神经系统上的对应。
参考文献:
Purves, D., Augustine, G. J., Fitzpatrick, D., Hall, W. C., LaMantia, A. S., McNamara, J. O., & White, L. E. (2014). Neuroscience, 2008.De Boeck, Sinauer, Sunderland, Mass .
来源:知乎 www.zhihu.com
作者:
知乎用户(登录查看详情) 【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。
点击下载 







没有评论:
发表评论