由于工作的原因,平时在给客户出自动化方案的时候会遇到找不到合适的解决办法或者是找不到合适的设备来完成整个系统的搭建,而其实仔细想想,其中有多是由于目前各种设备不成熟或者有世界范围内仍旧未能解决的技术的存在而造成的。
问题里问到的是工业机器人,首先得明确什么是工业机器人,由于我是仓储物流自动化行业的从业者,因此这里只从厂内物流自动化相关的角度来看看目前的工业机器人有哪些技术问题,抛砖引玉一下。
之前回答过一个工业机器人的问题,
目前全世界范围内,工业机器人先进到什么程度了?
目前全世界范围内,工业机器人先进到什么程度了?- 里边主要是从我熟悉的厂内物流自动化的角度来谈到的,主要是标准工业机器人和移动搬运机器人两大类。在这里我仍然从这两大类机器人来聊一聊。
谈目前的工业机器人存在的技术问题之前,我们可以从另外一个角度来思考一下,为什么有很多仓储物流中心或者工厂内对于物流和仓库的管理不采用机器人来代替人工呢?这个角度其实也能间接的反映出来工业机器人遇到的问题。那我从工业机器人应用的方面和上边提到的这个角度来看看。
- 工业机器人技术门槛高,价格昂贵
在我多年的接触的项目经验中,不管是厂内物流还是仓储物流中心里,用到的标准工业6轴机械手里绝大部分都是进口的,常见的有ABB,Fanuc,Kuka等等,这些设备成熟稳定,国内鲜有厂家能做出类似级别的标准产品。这意味着这些工业机器人的技术门槛比较高,自然带来的价格问题就比较昂贵,普通的小工厂或者项目从投资的角度很那普及。
我想着其实就需要用另外的新颖的角度来解决这个问题,比如针对某些行业或者需求,采用不同的技术原理也能实现同样的功能,但是价格比较低廉,适合于更多的潜在工厂和仓储物流中心。
其实,以上的角度是实实在在发生过的,比如国内很多厂家生产的类Kiva机器人。这种机器人完成的工作与传统的厂内AGV完成的工作是一样的,都是完成从A点到B的无人物料搬运。但是类Kiva机器人由于采用了全新的设计思路和技术,比如采用顶升物料方式和简易的地板上贴附二维码导航的方式,就完成了传统AGV可以完成的工作,甚至效率更高,而且由于结构简单,设计巧妙,国内生产的类Kiva机器人单台车体价格平均达到10万左右,相比传统激光导航AGV动则大几十万甚至上百万的投资,性价比高了不少。


2. 不足够灵活和柔性
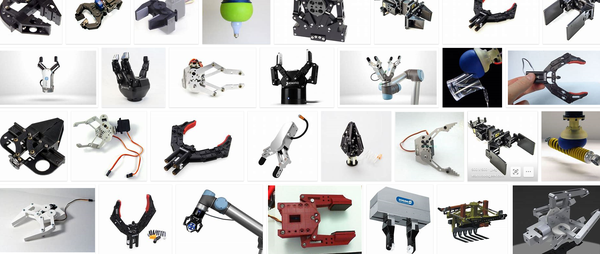
通常情况下,某个行业用到的工业机器人是根据本行业的工艺流程或者实际工况而有针对性的开发出来的,如果工艺发生了变化,之前的设备可能就需要优化甚至某些场合下需要完全推到重来。即使是柔性已经非常强大的标准工业6轴机械手也不例外。比如生产饮料的工厂里的机器人可以抓取某一款瓶装饮料,而由于市场的变化,工厂改生产另外一款包装类型的瓶子饮料,那此时的机械手可能就需要重新设计而且至少要替换掉之前的夹具。而在电商的订单处理配送中心里,订单千变万化,物品的形状也千奇百怪,如果是用机械手来自动完成所有的订单,目前也无法完全实现。比如下图中一个订单里有如下的物品,也许 这时候 人手 还是 最佳 的选择。

也许夹具有 千万种,但是没有一款能算是万能爪子的夹具可以应付一切的物料。
如果是移动搬运机器人的话,通常AGV也是由系统提前设定好的路线反复进行标准物料的搬运,如果搬运路线有变化或者是物料单元有变化,那搬运机器人也需要人工重新设定和调试才能恢复正常运行。

3. 机动性不够强
搬运机器人里最常见的就是叉车类AGV,相信熟悉或者见过此类机器人的都一个感觉:慢。为什么会有这种感觉呢,因为看见AGV大家就下意识的会拿它和人工开叉车对比。通常AGV的搬运速度为1米,如果是拐弯和后退,速度会更慢。相反,人工开叉车完全两个感觉,人工控制叉车行进时非常灵活,速度也会快很多。叉车AGV速度慢,其中有多方面的原因,跟速度控制和导航方式、安全因素各个方面都有关系。如果AGV上的传感器足够灵敏,速度控制和响应足够快,相信不久的将来,人工叉车会被完全替代掉。
另外,对于绝大多数的搬运机器人来说,行走的方式都是通过轮子的转动来实现车体的移动的,因此搬运机器人对地面有很高的要求,至少需要路面要平整。如果有沟壑和台阶或者有阻挡,通常的搬运机器人是无法克服的。
未来的搬运机器人也许可以像Boston dynamic公司的机器人一样,可以跨越任何障碍行走。帮助人类在厂内进行不同工位之间的物料搬运
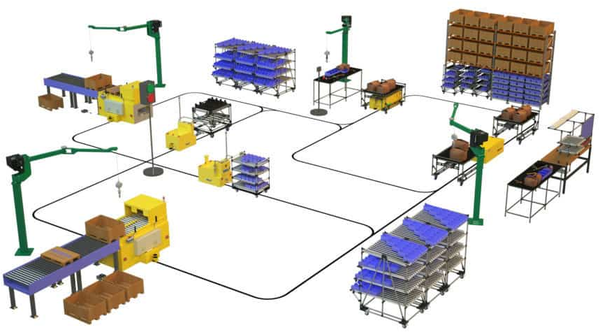
另外一方面,我们常见的工业6轴机械手通常是被安装在固定的地面上,比如对固定的几个工位进行拆码盘作业:

而某些应用场景下,需要机械手能有更加机动性,可以移动到更多的位置去处理更多的工位,常见的解决办法有,将机械手安装到可移动的导轨上,这样就可以机械手具有一定的机动性。

不过机械手只能在轨道范围内移动,如果机械手能自由移动,那就能适应更多的应用场景。而实际中确实也有类似的应用案例,比如讲机械手安装到搬运机器人上

这样的应用通常是对比较轻载的物料进行作业,一般是在20Kg以内的物料单元。如果需要兼容机动性和大负载,那需要底盘更大的搬运机器人辅助移动,同时也需要更加大容量的电池持续提供能源。比如:

不过载重越大,自然机动性也灵活度要弱一些。同时本身搬运机器人底盘也收一些因素的制约。
4.不足够智能
标准工业6轴机器人可以简单理解为一个更加结实和不知疲倦的人类胳膊,配上各种夹具就可以完成形形色色的工作应用场景。与人相比,机器人差的是指挥胳膊后边的那个强大的指挥大脑。比如对于机械手来说,针对不同的应用场景和项目,需要工程技术人员对其进行程序设定或者至少需要做的示教工作。如果物料单元放生变化,包括数量和位置的变化等,此时也需要对机械手进行人为的再次调试和数据输入。
再比如,在仓储物流自动化行业里经常会遇到需要给机械手配备3D视觉系统来动态识别当前需要夹取的料箱或者包裹的实际位置。这里会有视觉算法来识别多个物料单元的位置关系和位姿数据。而当前市面上的硬件设备和算法并不能应付所有的物料堆叠方式。有些甚至是对于人眼轻而易举能识别的位置,而对于机械手视觉却是个极大的难题。

再比如在移动搬运机器人领域里,现在流行的一种到导航方式是SLAM导航,由于其无需提前对运行的环境进行辐射反光板或者其他介质,可以非常快速的完成系统部署。
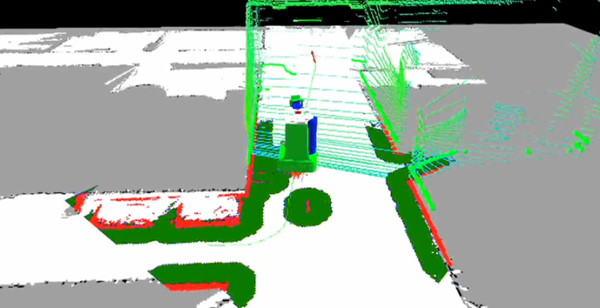
而这种导航方式需要运行的环境不能有频繁的变化,如果此时的工厂内有很多物料堆积到现场,此时也许会对搬运机器人造成定位的困扰。
以上只是从我的角度来简单讲了几个关于目前工业机器人比较笼统的存在可以继续优化的技术点。其实由于目前国内大环境的影响,这几年工业机器人发展的非常快,尤其智能化这块,不断有新的技术迭代更新,相信上述列出的问题,不久就可以得到完美的解决。
来源:知乎 www.zhihu.com
作者:
King 【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。
点击下载 此问题还有
20 个回答,查看全部。 延伸阅读:
机器人控制该怎么入门? 谷歌智能车的难点在哪里?模式识别,还是分析、控制算法?







没有评论:
发表评论